Views: 11 Author: BOAO LASER CHINA Publish Time: 2024-12-23 Origin: Site

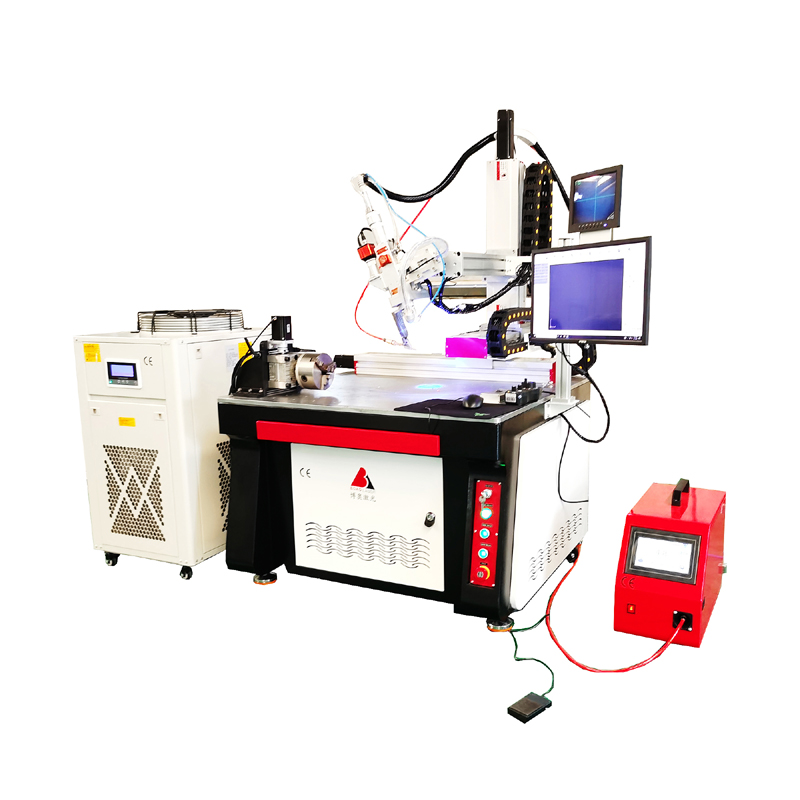
Robot Laser Welding And Grinding Machine Sent To Bulgaria
Composition structure
Welding robots usually consist of a robotic arm, a control system, a welding power supply, sensors and other auxiliary equipment.
Robotic arm: The robotic arm is the core part of the welding robot. It is usually composed of joints with multiple degrees of freedom, which enables the robotic arm to move flexibly to the desired position. A welding gun is installed at the end of the robotic arm. By controlling the movement of the robotic arm, precise welding operations can be achieved.
Control system: The control system is the "brain" of the welding robot. It is responsible for receiving external instructions, controlling the movement path of the robotic arm, welding parameters and welding process. Modern welding robots are usually equipped with advanced control systems that can handle complex welding tasks and can be programmed to achieve automated operations.
Welding power supply: The welding power supply provides energy for the welding process, and its output current and voltage will directly affect the welding quality. The welding power supply is connected to the control system and adjusted according to the set welding process parameters to ensure the stability of the welding process.
Sensors: Sensors play the role of "eyes" and "ears" in welding robots. They are responsible for monitoring various parameters such as current, voltage, temperature, etc. during the welding process, and feeding back data to the control system.
Working Principle
Path planning: Before the welding task begins, the control system plans the motion trajectory of the robot arm according to the pre-set welding path and process parameters. These paths are usually entered into the system through programming language or teaching method. The teaching method is that the operator manually guides the robot arm to move along the required welding path, and the system records the path and saves it as a program.
Start welding: After the welding path is determined, the welding robot starts the welding process according to the set parameters. The control system will control the output of the welding power supply and adjust the welding current and voltage according to the welding process requirements. At the same time, the robot arm moves along the planned path, and the welding gun welds the workpiece as the robot arm moves.
Sensor feedback: During the welding process, the sensor monitors the welding status in real time, such as welding current, voltage, weld temperature and other parameters. If any abnormality is detected, such as weld offset, excessive or insufficient current, the sensor will immediately feed back the data to the control system. The control system makes corresponding adjustments based on the feedback information, such as changing the welding path, adjusting welding parameters, etc. Some advanced welding robots are equipped with online quality monitoring functions, which can detect the weld in real time and make immediate corrections during the welding process.
Automatic processing and data recording: After the welding task is completed, the system will automatically process the data of the welding process and store the welding parameters, sensor feedback information, etc. in the database. These data can be used to analyze welding quality, optimize welding process, or as a reference for subsequent welding tasks.
Main performance technical indicators
The main performance technical indicators of welding robots can be divided into two parts, namely the general indicators of robots and the special indicators of welding robots. The following are some important technical indicators:
Number of degrees of freedom: an important indicator reflecting the flexibility of robots. Arc welding and cutting robots require at least 5 degrees of freedom, and spot welding robots require 6 degrees of freedom.
Load: refers to the rated load that the end of the robot can withstand. The load capacity of arc welding and cutting robots is 6~10kg. If the spot welding robot uses an integrated transformer and an integrated welding clamp, its load capacity should be 60~90kg. If a separate welding clamp is used, its load capacity should be 40~50kg.
Workspace: The working space given by the manufacturer is the maximum accessible space when the robot is not equipped with any end effector. After installing a welding gun (or welding clamp), the actual weldable space will be one level smaller than that given by the manufacturer.
Maximum speed: the maximum linear speed that can be achieved at the end of the robot wrist when all axes are linked. Since the speed required for welding is relatively low, the maximum speed only affects the arrival, empty stroke and end return time of the welding gun (or welding clamp).
Point-to-point repeatability: One of the most important indicators of robot performance. For spot welding robots, the accuracy should be less than 1/2 of the electrode diameter of the welding clamp, that is, +12mm; for arc welding robots, it should be less than 1/2 of the wire diameter, that is, 0.20.4mm.
Track repeatability: Very important for arc welding robots and cutting robots. The track repeatability of arc welding and cutting robots should be less than 1/2 of the wire diameter or the cutting hole diameter of the cutting tool, and generally needs to be less than +0.3~0.5mm.
Advantages
High precision: Through precise path planning and real-time sensor feedback, welding robots can achieve high-precision welding operations, reduce errors caused by human operation, and significantly improve welding quality.
High efficiency: Welding robots can work continuously for a long time and at a high speed, which significantly improves production efficiency. For large-scale production tasks, welding robots can maintain consistent welding speed and quality, greatly shortening the production cycle.
Safety: Welding robots can work in high-temperature and high-risk environments, reducing the risk of workers being exposed to dangerous working environments. In addition, automated welding reduces the work intensity of workers and reduces the incidence of occupational diseases.
Strong adaptability: Modern welding robots are highly flexible and can adapt to workpieces of different shapes and materials. Through programming, welding robots can quickly switch between different welding tasks to meet diverse production needs.
Application scenarios
Welding robots are widely used in many industrial fields, including but not limited to:
Mechanical manufacturing: In the field of mechanical manufacturing, welding robots are usually used for welding and connecting metal structural parts, containers, frames and some components.
Automobile manufacturing: In the field of automobile manufacturing, welding robots are widely used in the welding of gearboxes, engines, chassis and car bodies.
Electronic equipment: In the manufacture of electronic equipment, welding robots can weld precise and tiny components, circuit boards or connectors.
In addition, welding robots are also used in fields such as medical equipment manufacturing. In these fields, welding robots have brought significant improvements and guarantees to the production of enterprises with their high precision, high efficiency, safety and strong adaptability.
In summary, robot welding machines are indispensable and important equipment in modern industrial production. With the continuous development of technology, welding robots will be more and more widely used in various industrial fields, promoting the manufacturing industry to move towards intelligence and automation.